미쓰비시 서보 모터 원버튼 조정 기능
출시 시간:2023-03-02 16:03:05
기계에 처음으로 다른 서보 모터를 설치하면 작동 중에 기계와 일치하지 않는 경우가 있어 진동, 소음 및 기타 현상이 발생합니다.
문제의 원인은 서보 모터의 강성 및 부하 관성 비율 및 기타 매개 변수와 기계적 불일치가 있기 때문입니다. 영향을 받는 매개 변수가 많기 때문에 점진적인 조정은 시간 낭비일 뿐만 아니라 효과를 보장하기가 어려울 뿐만 아니라 이 문제는 오랫동안 많은 엔지니어들을 당혹스럽게 했습니다. 미쓰비시가 MR ConFigurator 2 서보 디버깅 소프트웨어를 도입하기
MR ConFigurator 2 서보 디버깅 소프트웨어에서 Mitsubishi는 다음과 같이 서보 모터 강성 노이즈 문제를 해결하기 위해 a & quot; 원 버튼 조정 & quot; 기능을 개발했습니다.
1. PA08을 0003으로 설정하고 게인 조정 양식을 2, 열기 & lt; 테스트 실행 & gt; 메뉴 & lt; 위치 지정 실행 & gt;, 속도 / 가속 / 감속 / 움직임을 설정합니다. 실제 상황 설정에 따라 이동량을 너무 크게 설정할 필요가 없습니다. 확인 & lt; 반복 작동 유용 & gt; 및 노화 기능 유용 & gt;, 기능은 반복 왕복 운동을 달성한 다음 작동을 클릭하여 시작하여 모터가 원버튼 조정을 위해 능동적으로 왕복 작동을 할 수 있도록 3. 원버튼 조정> 아래> 조정> 메뉴를 열고 <기본 양식> 을 수락하고 시작 버튼을 클릭합니다. 높은 형태는 일반적으로 나사 구조에 해당하며 기본 형태는 일반적으로 동기식 벨트 구조에 해당합니다. 4. 설정이 완료되면 조정 후 Mitsubishi 서보 파라미터 설정과 초기 값 사이의 비교 화면이 나타나 엔지니어가 소프트웨어에 의해 수정된 파라미터를 알 수 있습니다. 위는 사용자 지시 방법 설정 방법입니다. 이제 앰프 명령 설정 방법에 대해 이야기하겠습니다. 앰프 지시 방법은 조작이 더 간단합니다. 회전당 펄스 수에 따라 모터 회전을 설정하고 안전한 이동 간격을 확인한 다음 시작을 클릭하십시오. 원버튼 조정 기능은 엔지니어가 서보 모터를 조정하는 시간을 크게 단축하고 전력을 향상시키며 좋은 효과를 얻을 수 있습니다. 이것은 산업 제어 산업 엔지니어가 됩니다.
-
 202212-29
202212-29Siemens 주파수 변환기 사용에 대한 참고 사항
1. Siemens 주파수 변환기의 출력 라인 측은 콘덴서를 보상하기 위해 션트할 수 없으며 주파수 변환기의 출력 전압의 높은 고조파를 줄이기 위해 콘덴서를 션트할 수 없습니다. 그렇지 않으면 고조파를 줄이기 위해 ···
-
 202302-08
202302-08슈나이더 PLC 컨트롤러 설치 연결 방법
(1) 특성이 다른 신호 케이블을 동일한 도관에 배치할 때는 분리해야 합니다.동일한 카테터에 여러 개의 송전선이 포함되어 있지 않도록 합니다. 필요한 경우 도관에 칸막이를 설치하고 접지해야 합니다.(3) 와이어 ···
-
 202302-21
202302-21Omron CP1 시리즈 PLC 인터럽트 분류
1. Direct I/O 인터럽트는 CPU 랙의 내장 입력 장치(0→1; 1→0)에서 인터럽트 입력을 변경하는 것입니다.2, 카운트 인터럽트, PLC CPU 유닛 내장 입력 펄스 카운트, 카운트 리치 설정 값 및 인터럽트 실행.3, 타이밍···
-
 202301-17
202301-17ABB 로봇 액세서리의 설치 및 시운전 단계
ABB 로봇 설치 및 시운전에 대한 일반 단계:1. 로봇 본체와 제어 캐비닛을 제자리에 들어 올립니다.2. ABB 로봇 본체와 제어 캐비닛 사이의 케이블 연결3. ABB 로봇 교육 장치는 제어 캐비닛과 연결되어 있습니다.4.···
-
 202410-21
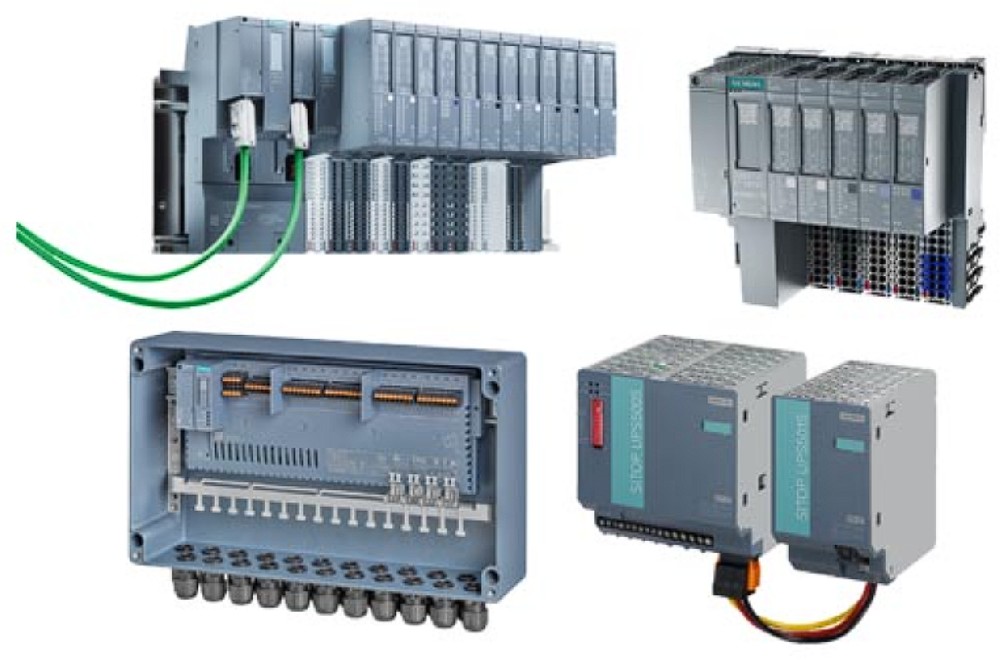
202410-21입력 및 출력 모듈: 알아야 할 모든 것
입출력 모듈(I/O 모듈)은 데이터 전송, 전력 부하 관리 및 시스템 기능 제어를 포함하여 CPU와 네트워크 간의 통신을 관리합니다.시스템 통합자는 서로 다른 장치를 연결하고 산업 네트워크를 더 잘 관리할 수 있으며···


 +8618621383628
+8618621383628 +8613811814778
+8613811814778 info@zhongpingtech.com
info@zhongpingtech.com 중국 베이징 조양구 Liyuan Community 빌라 26개
중국 베이징 조양구 Liyuan Community 빌라 26개