Siemens PLC는 Yamaha 로봇을 제어합니다.
출시 시간:2023-01-28 16:00:06
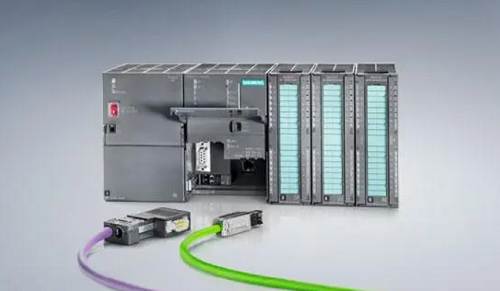
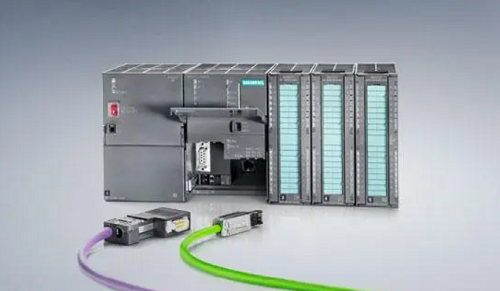
본 논문에서는 Siemens PLC가 제어하는 Yamaha 로봇의 제어 전략을 소개하고 외부 IO 포트를 사용하여 명령 단어를 설정하여 PLC가 로봇과 통신할 수 있도록 하고 로봇이 해당 작업을 완료하도록 지시합니다.
Siemens S7-300PLC는 현재 우리나라에서 널리 사용되는 대형 및 중형 PLC로, 이에 대한 연구와 장치 자동화 분야의 주변 로봇 제어 전략이 매우 중요합니다. 본 논문에서는 리튬 배터리 라인의 연구 및 생산을 바탕으로 Siemens S7300PLC와 Yamaha 로봇의 통신 및 제어를 완료하고 리튬 배터리 장치 과정에서 철근과 스탬프의 두 가지 핵심 프로세스의 연구 개발을 완료합니다.
1. 전반적인 하드웨어 설계
Siemens S7-300PLC 및 YAMAHA 로봇 컨트롤러 연결은 4개의 신호 그룹을 통해 로봇 시작 신호, 비상 정지 신호, 고장 신호 및 재설정 신호를 연결해야 하며 PLC 연결은 제어 로봇의 기본 요구 사항에 도달할 수 있습니다. PLC는 로봇과 연결되어 있습니다. 일반적으로 PLC는 송신 지침 측으로, 로봇은 수신 지침 측으로 사용됩니다. PLC 제어 로봇이 각 지점까지 걸어가는 목적에 도달하기 위해서는 PLC와 로봇 IO 신호
리튬배터리 장치 공정에서 강철 깔기 및 스탬핑 절차에 대한 기술 연구와 결합하면 로봇의 보행 지점이 16점을 넘지 않는다는 것을 알 수 있습니다. 8421의 포인트 포인트 계산에 따르면 로봇과 PLC의 연결 포인트는 4점입니다. PNP 표준 로봇은 Siemens와 연결되도록 선택되었습니다. 신호 연결에는 두 부분이 포함됩니다. 한 부분은 시작, 비상 중지, 고장 및 재설정 신호입니다. 한 부분은 PLC와 로봇 사이의 통신 라인입니다. 네 지점에서
2. 전반적인 소프트웨어 디자인
로봇 조회를 위한 소프트웨어 제어 전략, 전체 제어를 구현하는 PLC 명령 방법. 스택 로봇을 예로 들면, 로봇은 반환 후 1001 조회를 보내고, 로봇은 엔지니어링 요구 사항에 따라 신호를 받고, 로봇은 목표 방향으로 이동하도록 지시 받고, 목표 방향 신호는 (0001 - 1011) 총 9 포인트, 지점 위치 로봇이 제자리에 이동하고, 신호를 보낸 후 제자리에 알립니다. 로봇은 다른 주변 장치(실린더, 모터 등)의 동작을 제어하고 작업이 완료된 후 위치로 돌아가라고 로봇에게 말합니다. 로봇이 위치로 돌아간 후 설정 지침을 계속
Siemens S7-300PLC와 Yamaha 로봇 간의 통신 및 제어를 통해 리튬 배터리 장치 프로세스의 두 가지 핵심 프로세스에 대한 연구 개발 및 스탬핑이 완료됩니다. 배터리 장치 분야에서 사용되는 신호 전송 엔드 링크 방법을 통한 PLC와 로봇은 좋은 시연 역할을 합니다. 다른 배터리 장치 시퀀스, 기타 참조 PLC 및 로봇 제어 방법 및 제어 전략에서 사용할 수 있으며 대부분의 PLC 제어 로봇을 작업 지점까지 종료할 수 있으며
-
 202301-10
202301-10미쓰비시 주파수 변환기의 올바른 유지 관리 방법
주파수 변환기 모듈의 정기적인 유지 보수 외에도 미쓰비시 주파수 변환기 모듈, 특히 냉각 팬의 유지 보수를 정기적으로 확인해야 합니다. 냉각 팬의 큰 출력과 고속으로 인해 먼지가 많은 작업 환경에서 라디에이터···
-
![[Gongboshi 케이스] 전기 제어 캐비닛 박스 용접 - 고객이 생산 라인을 지능적으로 업그레이드할 수 있도록 지원하는 독립 브랜드 엔지니어링 박사](/static/upload/image/20221230/1672385439299376.png) 202212-30
202212-30[Gongboshi 케이스] 전기 제어 캐비닛 박스 용접 - 고객이 생산 라인을 지능적으로 업그레이드할 수 있도록 지원하는 독립 브랜드 엔지니어링 박사
전기 제어 캐비닛 캐비닛의 용접이 경우 용접 로봇을 엔지니어링 박사 로봇 포지셔너 및 총기 청소 스테이션과 결합하여 전자 제어 캐비닛 상자의 자동 용접을 실현하고 생산 효율을 개선합니다.응용 시나리오산업용···
-
 202301-17
202301-17산업용 로봇을 위한 ABB의 4가지 제어 모드
I. 포인트 제어 모드(PTP)이 제어 모드는 작업 공간에서 산업용 로봇의 엔드 이펙터에 의해 지정된 이산 지점의 위치만 제어합니다. 제어 시 산업용 로봇만 인접한 지점 사이를 빠르고 정확하게 이동할 수 있어야 하···
-
 202301-28
202301-28Siemens PLC는 Yamaha 로봇을 제어합니다.
본 논문에서는 Siemens PLC가 제어하는 Yamaha 로봇의 제어 전략을 소개하고 외부 IO 포트를 사용하여 명령 단어를 설정하여 PLC가 로봇과 통신할 수 있도록 하고 로봇이 해당 작업을 완료하도록 지시합니다.Siemens···
-
 202302-02
202302-02미쓰비시 인버터 과부하 결함 판단 방법
1. 모터의 3상 출력이 균형을 이루는지 확인(1) 모터의 3상 전압이 균형을 이루지 못하면 미쓰비시 인버터의 출력 단부의 3상 전압을 다시 점검한다.(2) 미쓰비시 주파수 변환기의 3상 전압도 불균형하면 문제는 미쓰···


 +8618621383628
+8618621383628 +8613811814778
+8613811814778 info@zhongpingtech.com
info@zhongpingtech.com 중국 베이징 조양구 Liyuan Community 빌라 26개
중국 베이징 조양구 Liyuan Community 빌라 26개